The Amatrice deployment is mentioned with pictures in the book “The Future of Robotics”
published by Ernst \& Young Advisory Co., Ltd. Japan in 2017. URL of the book (in Japanese):
This year the last TRADR Evaluation exercise (T-Eval) took place in the port of Rotterdam, the Netherlands, from 13 to 16 November 2017. The location was the Deltalinqs training facility, which offers and industrial setting consisting of a maze of pipes, containers, barriers and tanks, thus providing a realistic backdrop for the TRADR scenario.
During the exercise members of the Rotterdam Harbor United Firefighters (the TRADR end-users) used the TRADR system to execute a disaster response mission. Mission objectives included the creation of maps enabling autonomous UGV navigation, multi-robot patrolling and searching for Points of Interest, such as victims, fire, smoke and chemical leakage. Additionally, the robot arm was used to retrieve samples from the hot-zone. Due to improvements of the TRADR system in terms of stability, along with various new and improved functionalities, the firefighters were able to run a large number of sorties as part of the mission. As such the last evaluation exercise was concluded successfully.

 Saarbrücken, 6th October 2017
Saarbrücken, 6th October 2017
Dear Sir or Madam,
On behalf of the consortium of the European project TRADR (Long-Term Human-Robot Teaming for Robot Assisted Disaster Response) we are pleased to invite you to participate in the Robot-Assisted Disaster Response Technology Day organized by the Gezamenlijke Brandweer, Netherlands.
The TRADR Technology Day is part of the European Robotics Week.
Date: 17. November 2017
Time: 10:00 to 16:00 (arrival and registration from 9:30)
Venue: Congrescentrum, Heijplaatstraat 17-23, 3089 JB Rotterdam, The Netherlands
Topics: Robotics and AI technology use in disaster response: research, system development and practical experience
Real disaster response is time-critical and extremely stressful: the use of robots functioning as proper team members has the potential to reduce the workload and the stress of the humans and to take over dangerous tasks.
TRADR develops technology for human-robot teams to assist in disaster response efforts, using ground and air robots, in realistic missions spanning multiple days. We address a range of issues, from motion, navigation and mapping in complex changing environments, to human-robot team mission management support. End-users, first responders from the Italian Firecorps, the Firebrigade of the City of Dortmund in Germany and Gezamenlijke Brandweer in the Netherlands, are involved in the TRADR development cycle, from design to prototype testing. They provide input and feedback, experience the technology and become aware of its potential and current limitations, to in the end facilitate its uptake.
During the Technology Day we will show our achievements and share insights gained during the 4 years of the project, including experience from the TRADR deployment in Amatrice, Italy, shortly after the earthquake in 2016, as well as the industrial use case experiments carried out in 2016 in Dortmund and in 2017 in Rotterdam. The program will consist of presentations and posters on TRADR scientific results and practical experience with the use of robots, a demonstration of the TRADR integrated system and panel discussion. The Technology Day is intended for a broad range of stakeholders including industry, end users from firebrigades and other responders, academia as well as interested general public.
To register for the event and for more information please click here.
Please register online at your earliest convenience as we will close registration upon reaching our maximum capacity.
The participation is free of charge.
Accommodation: We recommend the Hotel Bastion Rotterdam Zuid that is located near the venue.
Public transportation: please see here.
If you have other questions, please send an email to: technologyday@dfki.de
Thank you for your interest and looking forward to welcoming you on November 17th.
Dr. Ivana Kruijff-Korbayová
TRADR Project Coordinator
A presentation of the TRADR project and a life demonstration of the TRADR system took place as part of the Public Program accompanying the European Robotics League – Emergency competition taking place on September 15-23 2017 in Piombino, Italy. The ERL Emergency is a civilian, outdoor robotics competition, with a focus on realistic, multi-domain emergency response scenarios. Inspired by the 2011 Fukushima accident, the ERL Emergency Grand Challenge can only be overcome when land, underwater and flying robots successfully cooperate. A public event late night on Sunday September 17 featured three EU-funded projects in the area of emergency response: Walk-Man, Sherpa and TRADR. The TRADR coordinator Ivana Kruijff-Korbayova (DFKI MLT) together with Emanuele Gissi, a Fire Officer of the Italian Firecorps (Vigili del Fuoco) delivered a presentation about the scientific results of TRADR and the TRADR deployment in Amatrice after the devastating earthquake of August 2016. Luigi Freda (La Sapienza University, Rome) demonstrated two TRADR ground robots in action in autonomous multi-robot patrolling. The event was attended among others by Mady Delvaux, Member of the European Parliament, Anne Bajart from the EC, Alan Winfield from University of the West of England and the ERL Emergency Coordinator, Reinhard Lafrenz, Secretary General of euRobotics AISBL. The TRADR presentation and demonstration were a great success that draw the attention of a big audience despite the late night hour.


The objective of the TRADR project is to enable a team of humans and robots to collaborate in a disaster response scenario which can last over several days. To achieve this, one of the core capabilities of the robots is their capacity to create a 3D map of their environment and to localize themselves within this map.
The TRADR consortium has recently open-sourced three libraries with the purpose of enabling robots equipped with 3D laser scanners to perform the above mentioned tasks. The curves library is used to represent the robot’s continuous-time trajectory in 3D space while the laser_slam library implements the back-end estimation functionalities of the localization and mapping system. The SegMatch library finally enables the robots to recognize previously visited places and to transmit this information to the back-end in order to close loops and to register trajectories of different robots.
Links to libraries:
https://github.com/ethz-asl/curves
https://github.com/ethz-asl/laser_slam
https://github.com/ethz-asl/segmatch
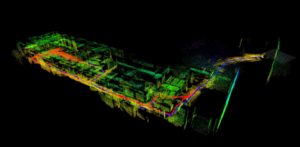
The following figure illustrates a map which was generated by fusing 3D laser scanner measurements from two unmanned ground vehicles which were collected during the TRADR Evaluation exercise at the Gustav Knepper Power Station in Dortmund, Germany. The map is coloured by height and the robot trajectories are represented as blue and red lines.
For more information about the place recognition algorithm please consult our paper (https://arxiv.org/pdf/1609.07720v1.pdf) and have a look at our video (https://www.youtube.com/watch?v=iddCgYbgpjE). Easy to run demonstrations can be found in the wiki page of the SegMatch repository. More to come!
