Phoenix West
The “Phoenix West” area of Dortmund, Germany, is an industrial ruin, where a shut down blast furnace can be found. Today, it is a restrict zone for civilians, but thank our project partner fire brigade of Dortmund city, we have unique opportunities to hold training and exercise sorties in the highly realistic environment of Phoenix West. The operational space is characterized by furnace, stairs, ramps, balustrades and complex architectural and machinary structures. Also, the industry complex consist of roofed dark areas as well as open bright areas, which may represent challenging factors for visual sensors in particular. Furthermore, as a ruin with a lot of complex damaged structures, this site provides very realistic middle scale industry disaster environment.
For training purpose, we install further elements such as fog machine limiting the sensory possibilities, chemical containers and objects to be found, and human victims.
Following images give an impression of the site and the sortie setup of TJEx 2015:
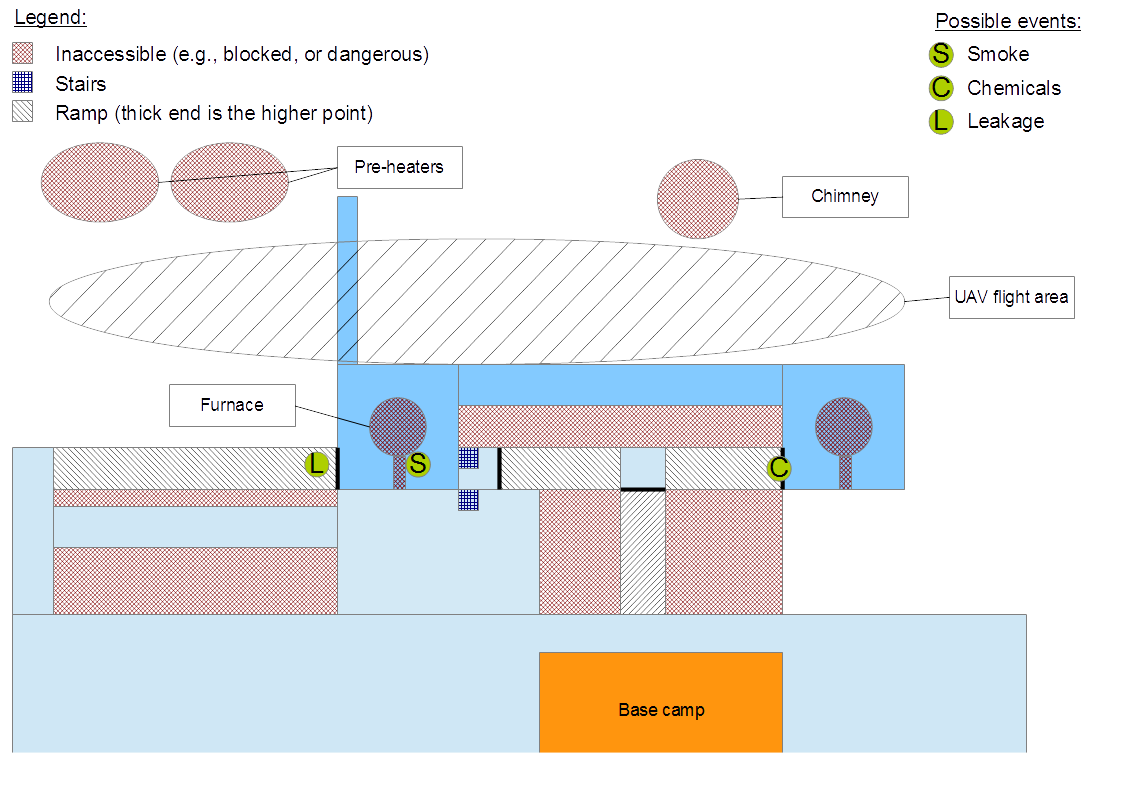 Sitemap of Phoenix-West in Dortmund, Germany |
 Phoenix West in Dortmund, Germany |
In our joint exercise and review sorties, we use realistic scenarios to evaluate the capability of the entire system. One single sortie may be composed as described below as examplary case, but can vary from exercise to exercise.
TJEx (TRADR Joint Exercise) 2015
Basically there are five UGVs (named “Echo”, “Delta”, “Tango”, “Charlie”, “Romeo”) and more than one UAV (named “FalconA”, “FalconB”, etc.) involved in TRADR project. Every TRADR robot with suitable sensor and actuator systems can be assigned to all possible roles. Some of possible roles, such as victim search or sample collection, are described below in an example scenario of TRADR joint exercise. Here, a team of two UGVs and one UAV would help human infield rescuers to survey the site. :
The first UGV drives up the ramp, takes a left and traverse the stairs. For 3D environment perception, laser scanner is used. Driving on, the first UGV finds there is a lot of smoke. Using gas detector, it detects chemicals and puts information into the system. The second UGV is notified that there is a sample to take. The first UGV searches for victim via camera and thermo-camera. During the search, the first UGV records audio samples. When the first UGV finds a victim, communication is possible via audio. The first UGV searches further for victims via camera, goes to the right in the direction of the fire. At a certain time, go-home-call is received so that the first UGV drives back home.
The second UGV is controlled via free-look control. It also uses laser scanner for environment perception. The second UGV drives up ramp, his gas detector detects chemicals and takes a sample as instructed by the first UGV. For picking up the bottle containing the chemicals, the second UGV uses a robotic arm. The second UGV continues to drive to the bridge and requests hand-off of sample with IR. The second UGV gets notification that help is needed to take a camera picture of chemicals. The second UGV drives past the fire to the chemicals, takes picture by camera, and drives back home.
The UAV flies over the scene and uses its camera to provide an overview of the situation throughout the sortie. The UAV furthermore finds victims via camera pictures. The UAV is remote-controlled by an UAV pilot.
