Workplan
Project duration : 4 years (November 2013 — December 2017)
Road Map
TRADR adopts a scenario-based roadmap, to drive iterative S&T development and integration. The roadmap defines a single scenario setting, namely a large-scale industrial disaster. Within this setting, the roadmap then defines yearly uses cases which deal with situation assessment (e.g. through observation, and sample gathering) under increasingly more complex circumstances. This is a kind of disaster where persistence is key to a successful mission. Missions take longer than a single drive onto the scene, we need multiple robots to investigate the disaster from different angles (literally), and we need to use them over a number of sorties to gradually build up an assessment.
Road Map Yr1:
Multiple asynchronous sorties to assess a large-scale static disaster area
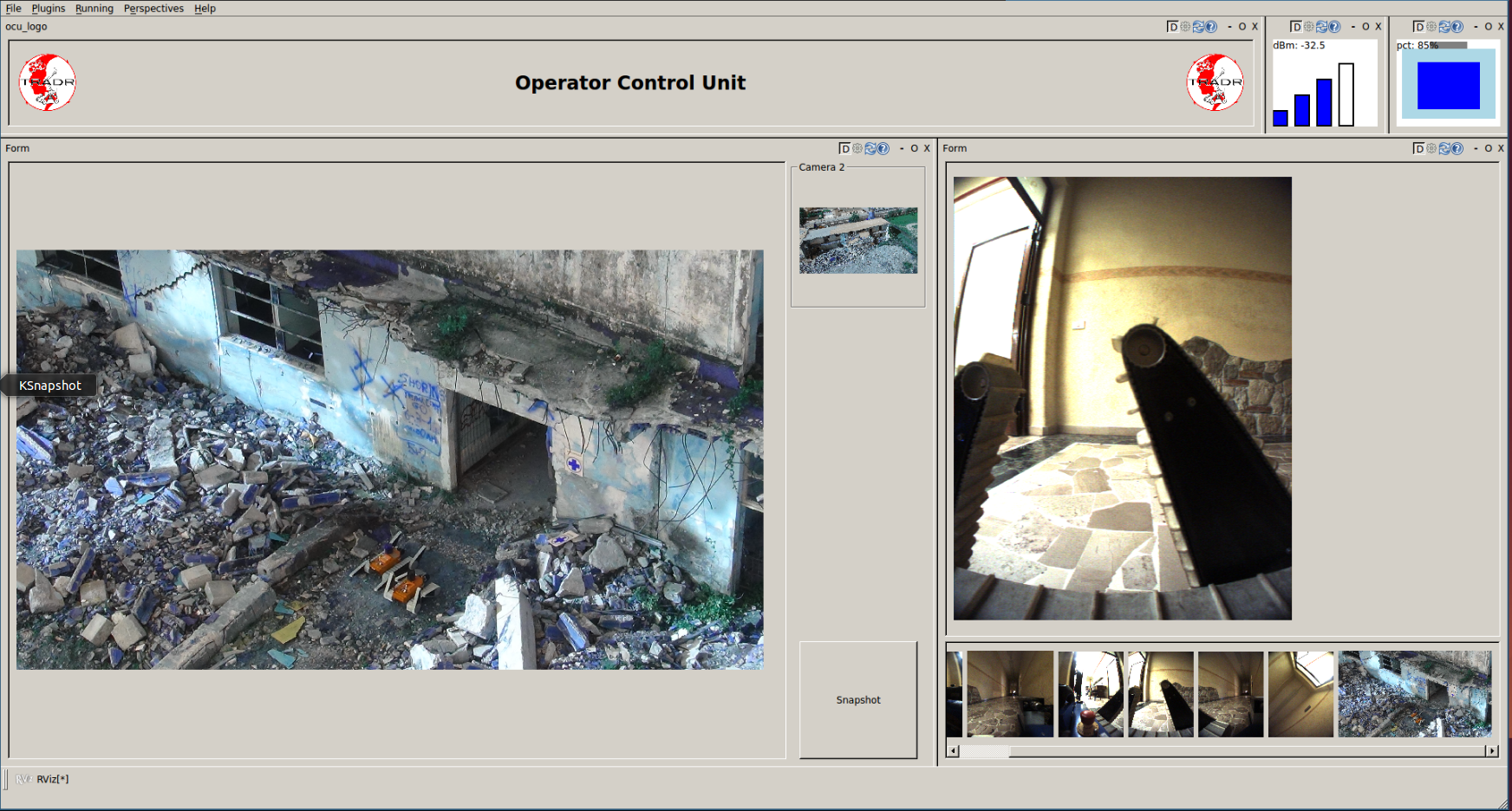
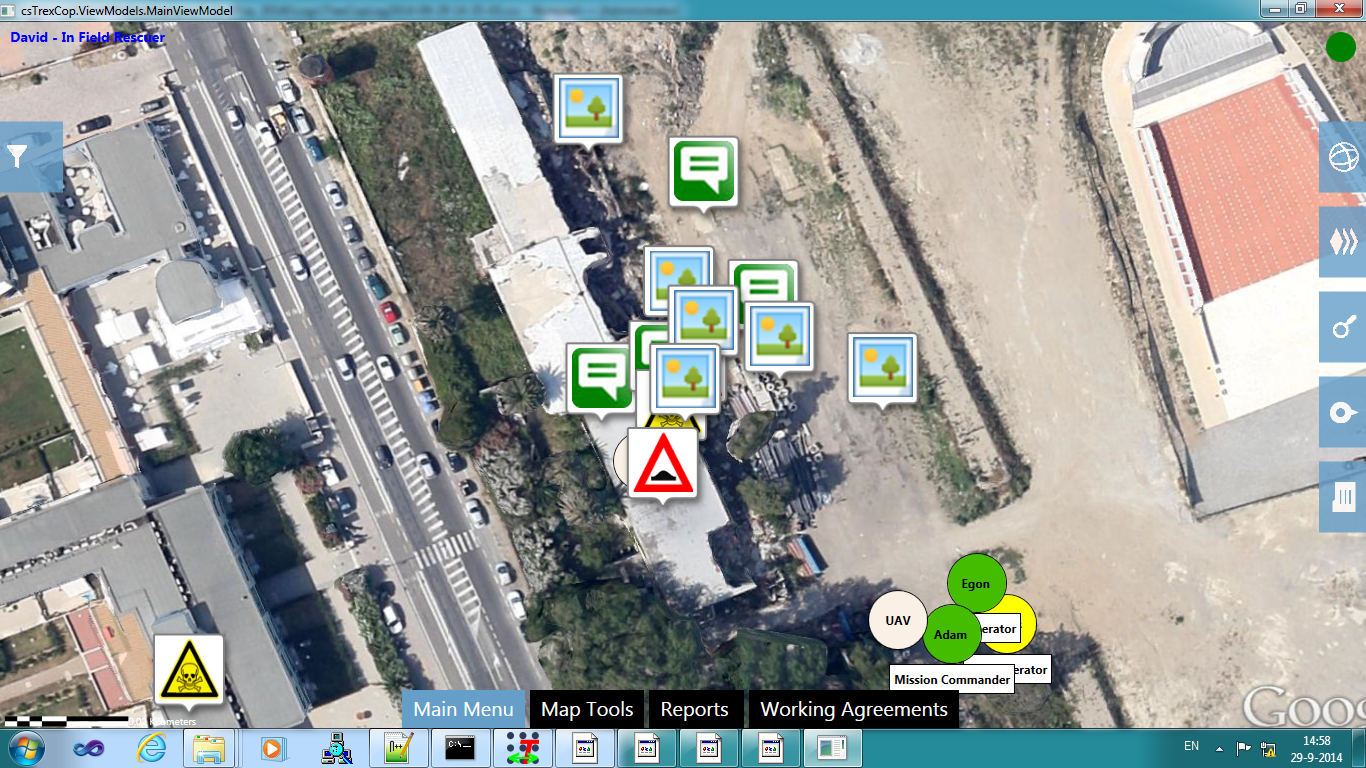
The goal in Yr1 is to enable a fixed human-robot team to gradually build up situation awareness of a static disaster site over multiple, asynchronous sorties. The team consists of approximately three human team members operating from a remote command post, a NIFTi ground rover (UGV), and a quadcopter/microcopter (UAV), resulting in a Human-to-Robot ratio > 1 : 1. Situation awareness focuses on determining and exploiting interesting observation and sample sites, to result in a 3D visualisation of the environment model and one or more physical samples to be returned to the command post.




Road Map Yr2:
Multiple asynchronous sorties to assess a large-scale dynamic disaster area
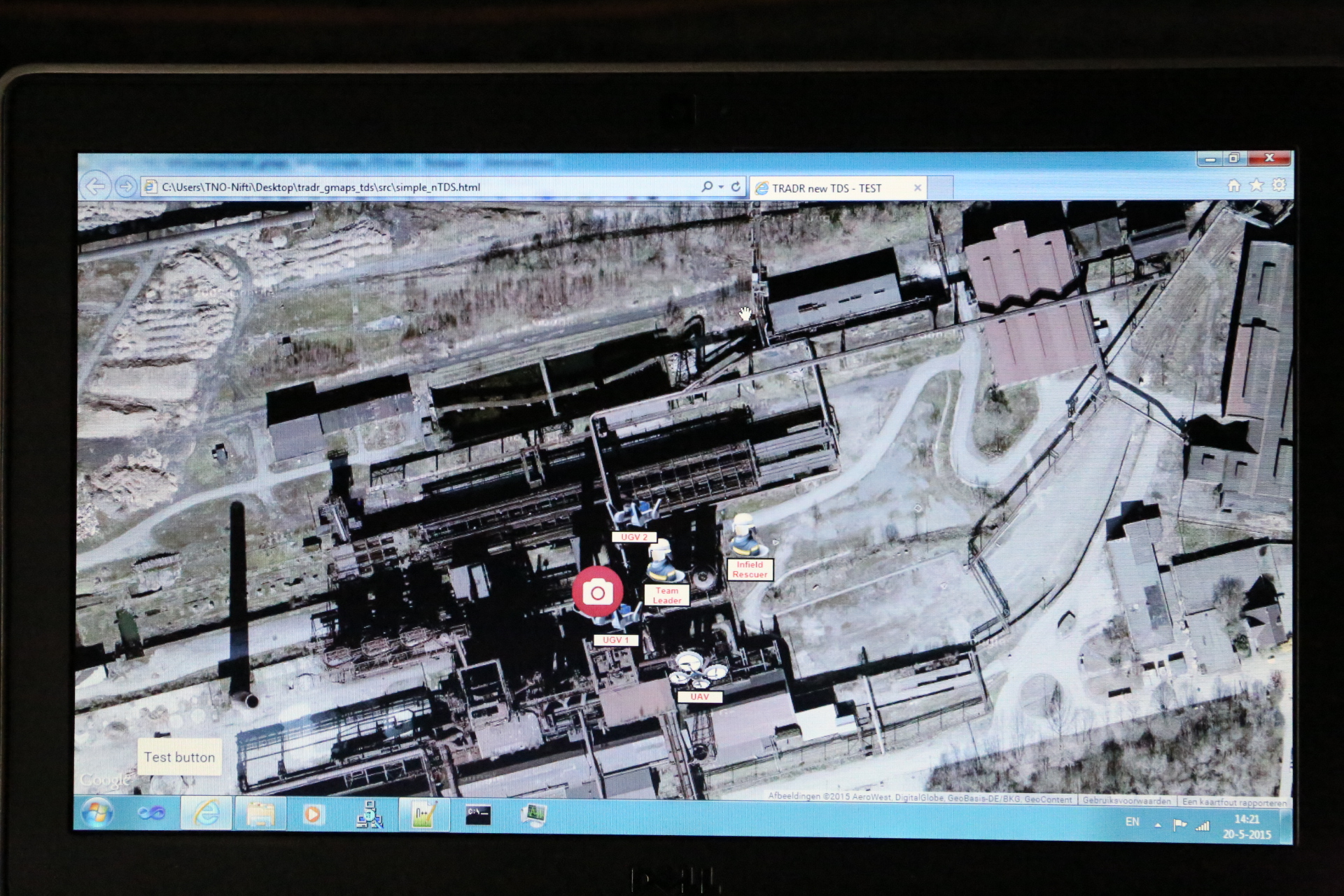
In Yr2, TRADR moves to dealing with a dynamic environment. The goal is for a fixed team to build up situation awareness of a dynamic disaster site over multiple, synchronous or asynchronous sorties. Dynamic events are localised, such as contained fires, limited out pour of liquids, falling over small structures or objects (e.g. barrels, small containers). Sorties can be synchronous or asynchronous, and can involve one or more robots (1 UAV, up to 2 UGVs) so that the Human-to- Robot ratio starts approaching 1 : 1.
Year 2 Joint Exercise and Evaluation





Road Map Yr3:
Multi-robot task adaptation
In Yr2 TRADR brings multiple robots into the field, during individual missions. This yields valuable insights in how environment models get fused, and may be used. In Yr3 TRADR builds on these insights to move task adaptation from a strictly individual focus, to a multi-robot setting: How could a robot learn from its use of information provided by others, to adapt its own tasks as well as anticipate requests for such collaboration in (future) plans? For example, if a UGV uses a UAV-provided overhead shot of an obstacle to determine how to cross said obstacle, could the UGV learn from that to request similar information from the UAV next time it faces a similar obstacle? In Yr3 TRADR restricts this learning for information gathering-and-use strategies to a within-sortie planning and execution context. This coordination across robot team members effects the overall dynamics of the human-robot team. Particularly, it can shift the supervision and information-providing “load” from human operators to robots – while at the same time requiring that the humans do stay in the loop.
Road Map Yr4:
Persistence in long-term human-robot teaming for robot-assisted disaster response
In Yr4, TRADR achieves its project-wide objectives. Over the years, more and more robots were introduced, including multiple ways in which robots could collaborate among themselves (squads; synchronous and asynchronous collaboration). Persistence in modeling the environment covers an ever-increasing complexity in local and global dynamic events, appearing on an ever-larger spatio-temporal scale. Robots have come to learn with these situations, and in general how human team members tend to act under those circumstances. In the last year, we once more scale complexity to further reduce the human-to-robot ratio, and increase the temporal scale. Furthermore, we introduce full flexibility in how a human-robot team is composed at any given time: Different robot and human team members may be active at a given point of (day/night) time, to reflect the toll a long deployment typically takes on teams. We do assume that human team members rotate, (i.e. no swift starts in the middle of a deployment).
List of Work Packages (WP)
| WP Number | WP Title | Lead |
|---|---|---|
| WP 1 | Persistent models for perception | CVUT |
| WP 2 | Persistent models for acting | KTH |
| WP 3 | Persistent models for distributed joint situation awareness | FDDO |
| WP 4 | Persistent models for multi-robot collaboration | ROMA |
| WP 5 | Persistent models for human-robot teaming | DFKI |
| WP 6 | System framework and integration | Fraunhofer |
| WP 7 | User needs analysis and scenario-based evaluation | TUD |
