More than 60 guests from the Netherlands and abroad gathered on the premises of the RDM Congress Center in Rotterdam on November 17 2017 for the TRADR Technology Day. Most of them represented various Firebrigade organizations, several came from robotics companies and some from universities and research institutes. The program of the day consisted of presentations, discussions, a poster session and demonstrations of the TRADR integrated system.

In the introduction about the TRADR project the coordinator Ivana Kruijff-Korbayova explained the TRADR goals, approach and outcomes. She stressed the importance of the close collaboration between researchers and end users in TRADR, which has also enabled the project to deploy its technology in a real disaster response after the earthquake in Amatrice, Italy in 2016. Presentation
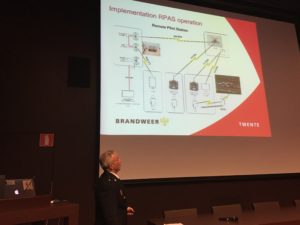
Martijn Zagwijn, information management specialist of Firebrigade Twente introduced the drone project he is leading. The drone project provides disaster management support and has been in operation since January 1 2016 after two years of preparations, needed to comply with all regulations. Currently it is being extended to a nation-wide project. Presentation

Hauke Speth, head of the Training Department and Institute for Fire and Rescue Technology at City of Dortmund Fire Department reviewed the experiences of the Dortmund Firebrigage with the use of robots in the research projects ANCHORS and TRADR and the ensuing inclusion of a drone as part of their regular incident response capability. He stressed that it is essential that operators be used to deploy the systems in everyday practice, and underlined the importance of collaboration between research, industry and end users in order to advance the use of robots for disaster response. Presentation
 During the poster session the TRADR project partners presented their results in a broad range of areas: learning for exploration, detection and 3D mapping; learning and modelling for terrain perception and robot control; perception and control for manoeuvring and manipulation; multi-robot localisation and change detection; multi-robot autonomous patrolling and exploration; 3D mapping for UAVs; human-robot teamwork modelling; enhancing human-robot team performance with work agreements; team communication processing; user strategy for tactical command.
During the poster session the TRADR project partners presented their results in a broad range of areas: learning for exploration, detection and 3D mapping; learning and modelling for terrain perception and robot control; perception and control for manoeuvring and manipulation; multi-robot localisation and change detection; multi-robot autonomous patrolling and exploration; 3D mapping for UAVs; human-robot teamwork modelling; enhancing human-robot team performance with work agreements; team communication processing; user strategy for tactical command.

The TRADR integrated system was presented in action in a simulated incident response mission enacted at the Deltalinqs training plant. End users from the Gezaamenlijke Brandweer controlled the TRADR ground robots to explore the incident area, locate victims, identify hazard sources and collect samples. The guests could observe the mission progress in the TRADR command post, where they could see how TRADR supports situation awareness of the team, and in the field, where they obtained explanations about the robot capabilities, including mapping, autonomous terrain traversal, guided manipulation and multi-robot patrolling and exploration. Since the regulations did not allow the team to fly the TRADR UAVs, the capabilities for UAV 3D mapping and data collection were explained using video material.

During the discussion sessions the participants exchanged experience and opinions about the current and future use of robots in incident response, the obstacles that block robot use and how to overcome them. The representatives of the Dutch Firebrigade organizations used the opportunity to discuss how to synchronize their efforts at the national level.
The TRADR Technology Day provided an opportunity for fruitful discussions and establishing new contacts.
We hope that it has made a useful contribution to the future of robot-assisted disaster response. A video from the event can be found here.

The event was part of the European Robotics Week 2017. Tweet about the event #ERW2017.











